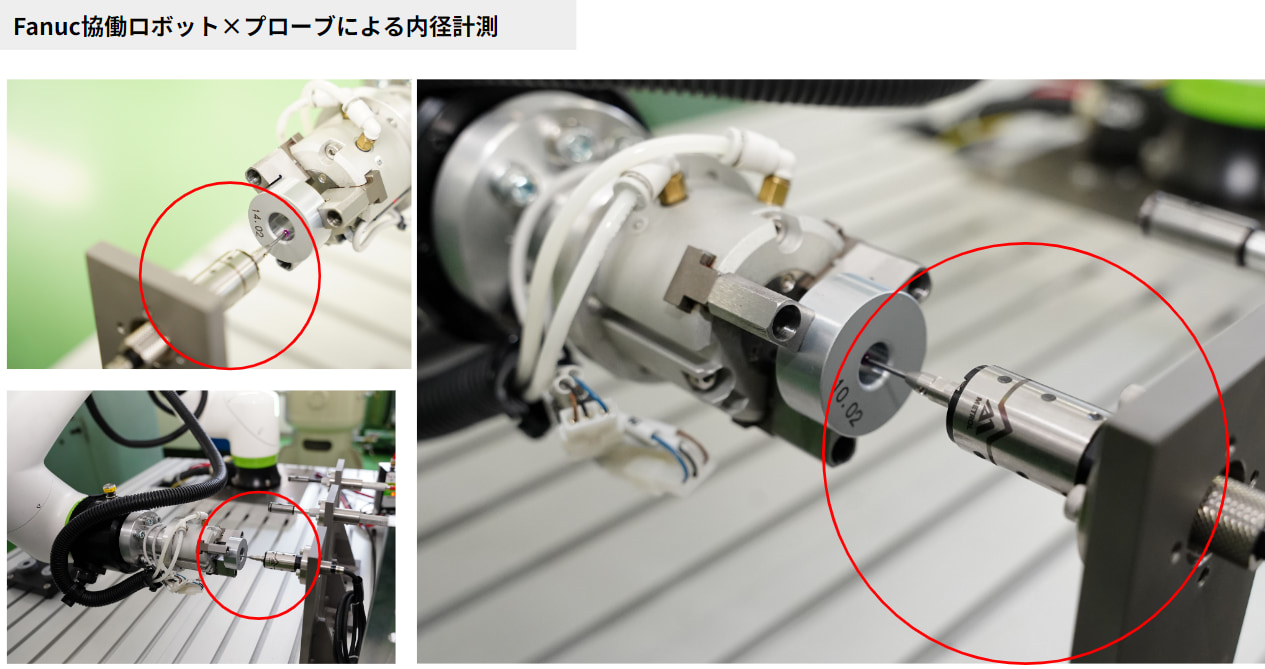
ロボットのハンド交換でタッチプローブを活用。ワークの原点出し・計測を自動化

目次
お客様の課題
大型ワーク(EVバッテリーケース、エンジンなど)、長尺ワーク(木材、鋼材など)は、サイズが大きすぎてCNC加工機に入りきらず加工できませんでしたが、多関節ロボットを利用して加工が可能となりました。
しかし、ワークの原点出しや加工後の計測は、マイクロメーターや専用治具を使って手作業で計測するため、作業者による測定結果のバラツキと、計測する手間で困っていました。

課題のポイント
ワークが大きすぎるため工作機械で加工できない。
切削加工の原点出しや、加工後の測定が手作業で多大な工数を要する。
メトロールのご提案
ツールチェンジャーを利用し、ドリル(加工)とタッチプローブ(計測)を持ち替えながら作業を行います。
タッチプローブの導入で
- 加工の原点出し
- 加工後の計測
を自動化。手作業で実施していた業務を自動化することにより、測定工数を大幅に削減することができました。
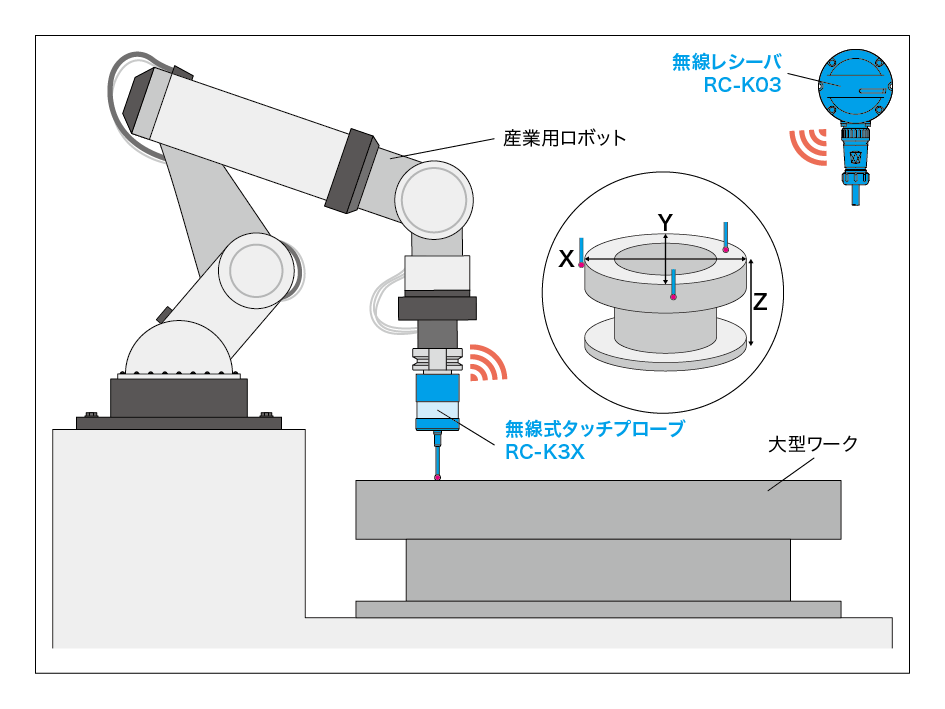
1.ロボットハンドをタッチプローブに持ち替え、ワークの原点出しを行う
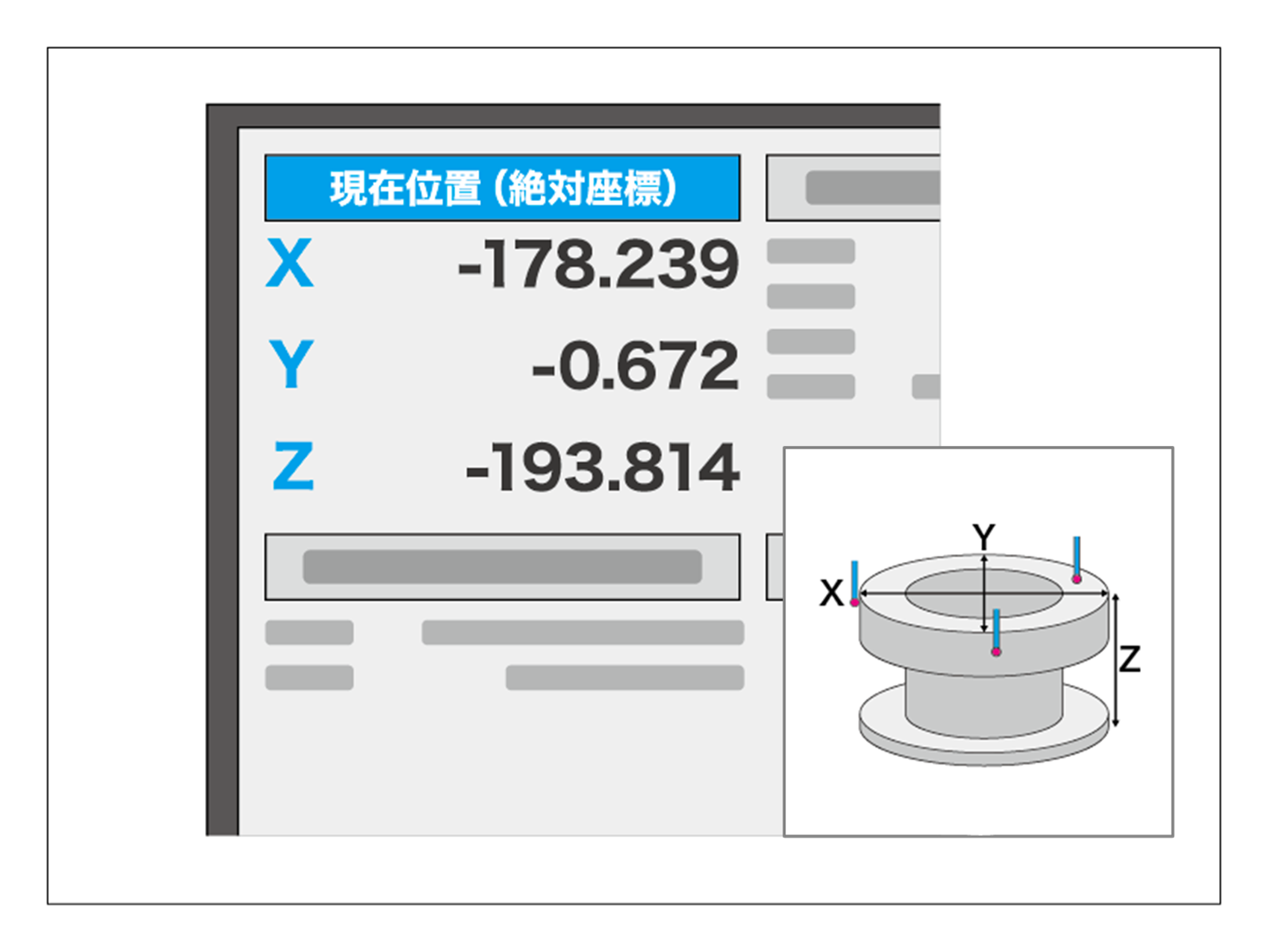
2. タッチプローブの計測結果としてワークの座標位置が表示される
3.タッチプローブとドリルを持ち替える
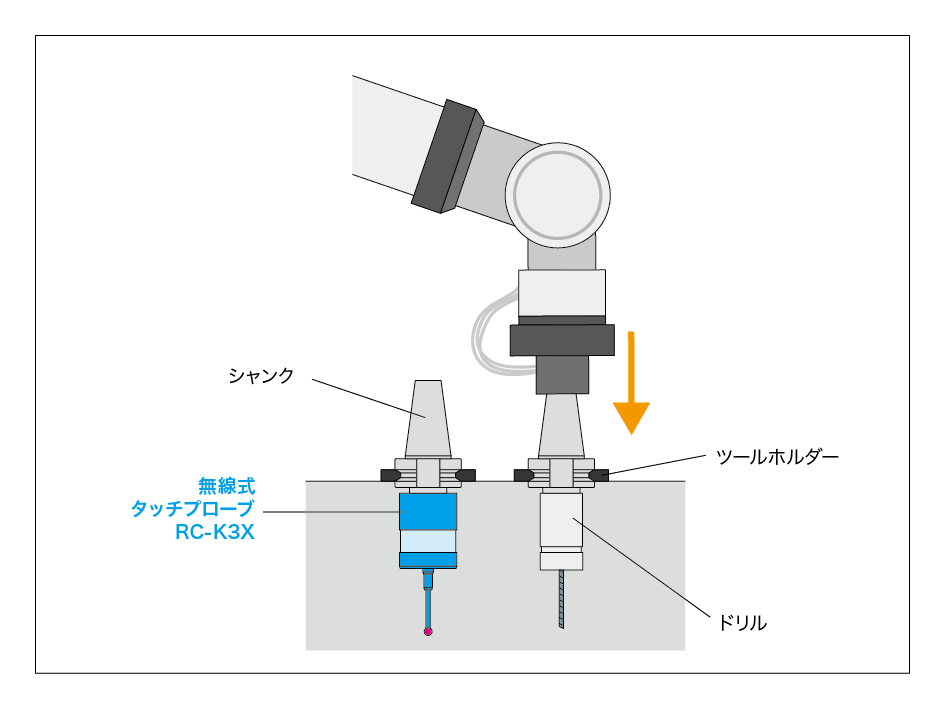
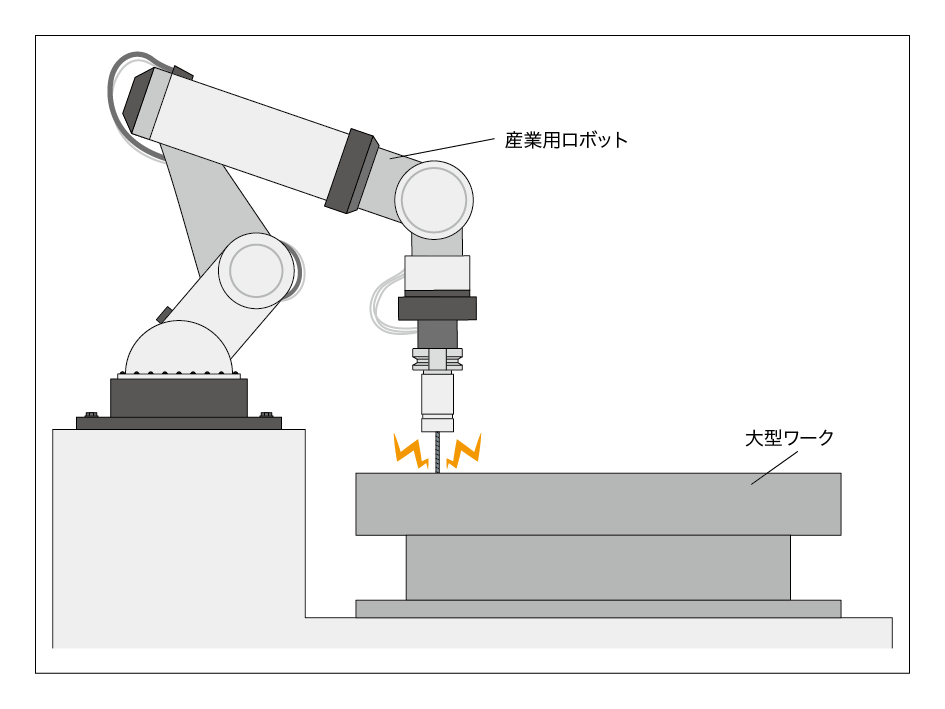
4.プローブで計測した位置座標に基づいてワークを加工する
採用結果
原点出しの精度があがり加工精度が向上
加工後の計測自動化で作業者の検査工数が大幅短縮
イメージ
FANUC製 協働ロボット

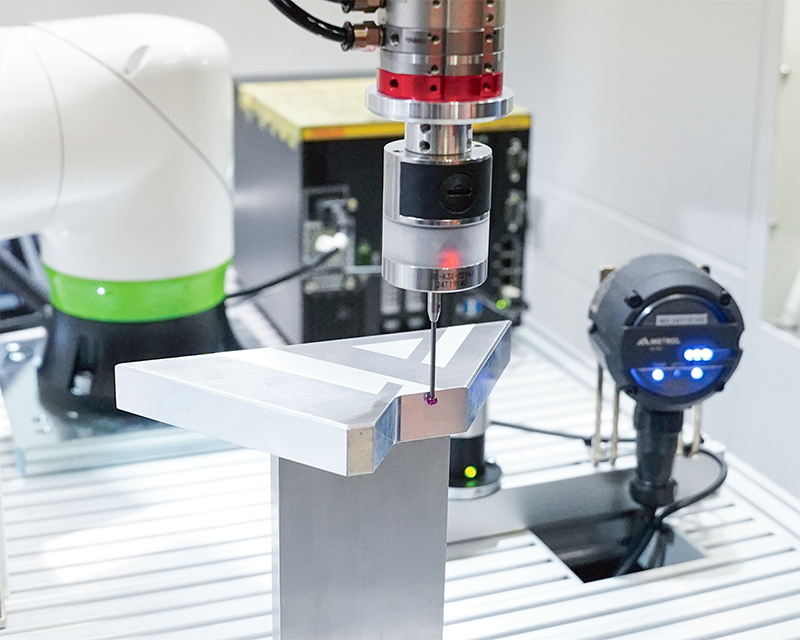
①タッチプローブでワークの原点出し
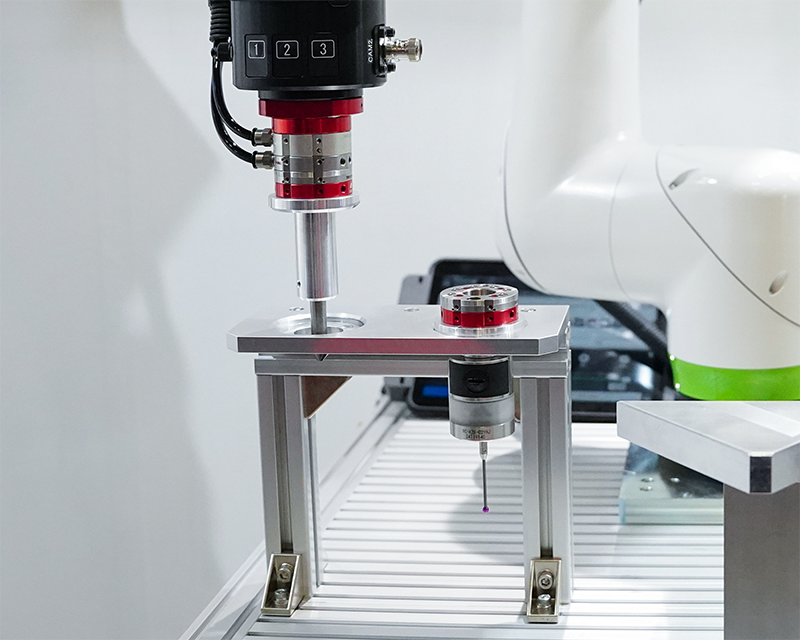
②原点出しが終わったら、バリ取りツールに置き換え
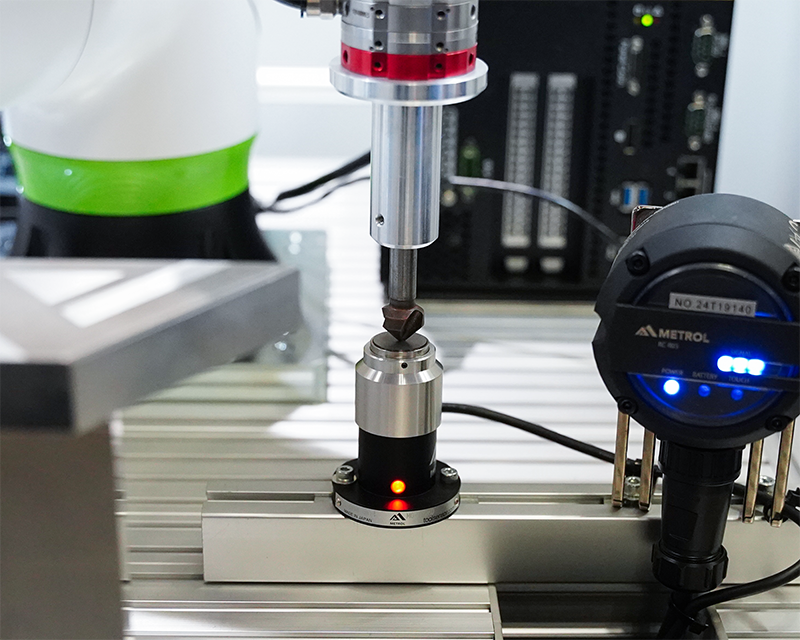
③ツールセッタでバリ取りツールの工具長測定
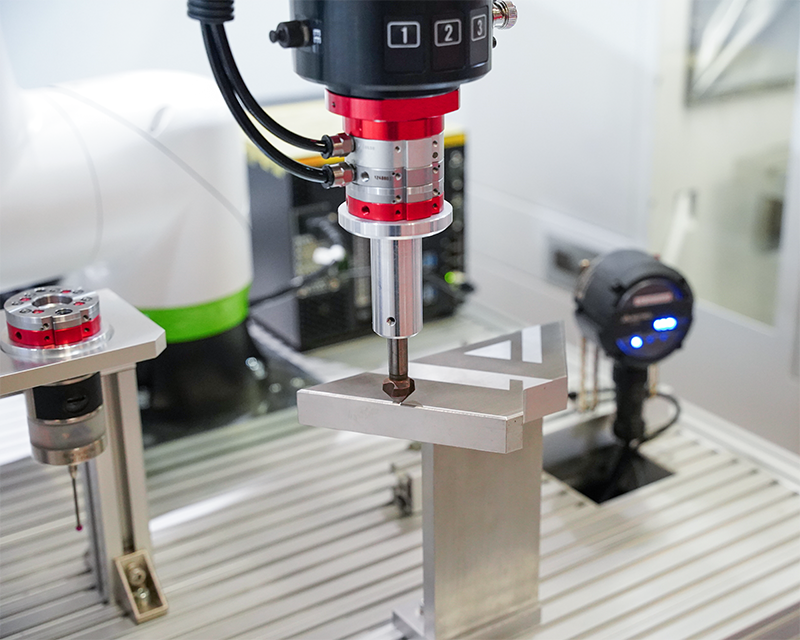
④バリ取り実施
ユニバーサルロボット

FANUC製 協働ロボット

担当者のコメント
産業用ロボットを様々なハンドに持ち替えることによって、「磨き加工」「バリ取り」「穴あけ」「溶接」など1台で何役もこなせるようにしている企業が増えています。ロボットアームに弊社のタッチプローブを持たせ、ワークの外径・内径、高さが希望の仕様で加工できるように自動化しました。人手不足で測定を自動化したいとの要望は多く、お客様に大変喜んでいただいてます。
本事例でご紹介した製品はこちら

無線タッチプローブ RC-K3X
[CNC工作機械用]高精度ワイヤレスタッチプローブ
RC-K3XシリーズはCNC工作機械やロボットで、ワークの芯出しや加工後の寸法計測をする、国産のワイヤレス3次元タッチプローブです。 無線通信を使い、プローブの測定信号を受信機が機械へ伝達します。